Steven Man

Hi, I am a Ph.D. student at Carnegie Mellon University Robotics Institute working with Prof. Aaron Johnson and Prof. Sarah Bergbreiter. My research interests lie in the intersection of design and control for novel robot locomotion. I’m fortunate to be supported by the NSF Graduate Research Fellowship.
Priror to joining CMU, I received my B.S. in Mechanical Engineering from the University of California, Santa Barbara, where I worked with Prof. Elliot Hawkes on everting soft robots for industrial inspection and shape-changing robotic collectives. I have also spent summers working at Johns Hopkins University Applied Physics Lab, CMU Robotics Institute Summer Scholars, and SpaceX.
news
| Nov 12, 2025 | The project I started as an undergraduate (during RISS) The microDelta: Downscaling robot mechanisms enables ultrafast and high-precision movement was published in Science Robotics ! |
|---|---|
| Apr 01, 2025 | I was awarded the National Science Foundation Graduate Research Fellowship (NSF GRFP)! |
| Jan 27, 2025 | My paper submission Zippy: The smallest power-autonomous bipedal robot was accepted to International Conference on Robotics and Automation 2025 ! |
| Nov 20, 2024 | My undergraduate work Large-Scale Vine Robots for Industrial Inspection: Developing a New Framework to Overcome Limitations With Existing Inspection Methods was published in Robotics and Automation Magazine ! |
selected publications
-
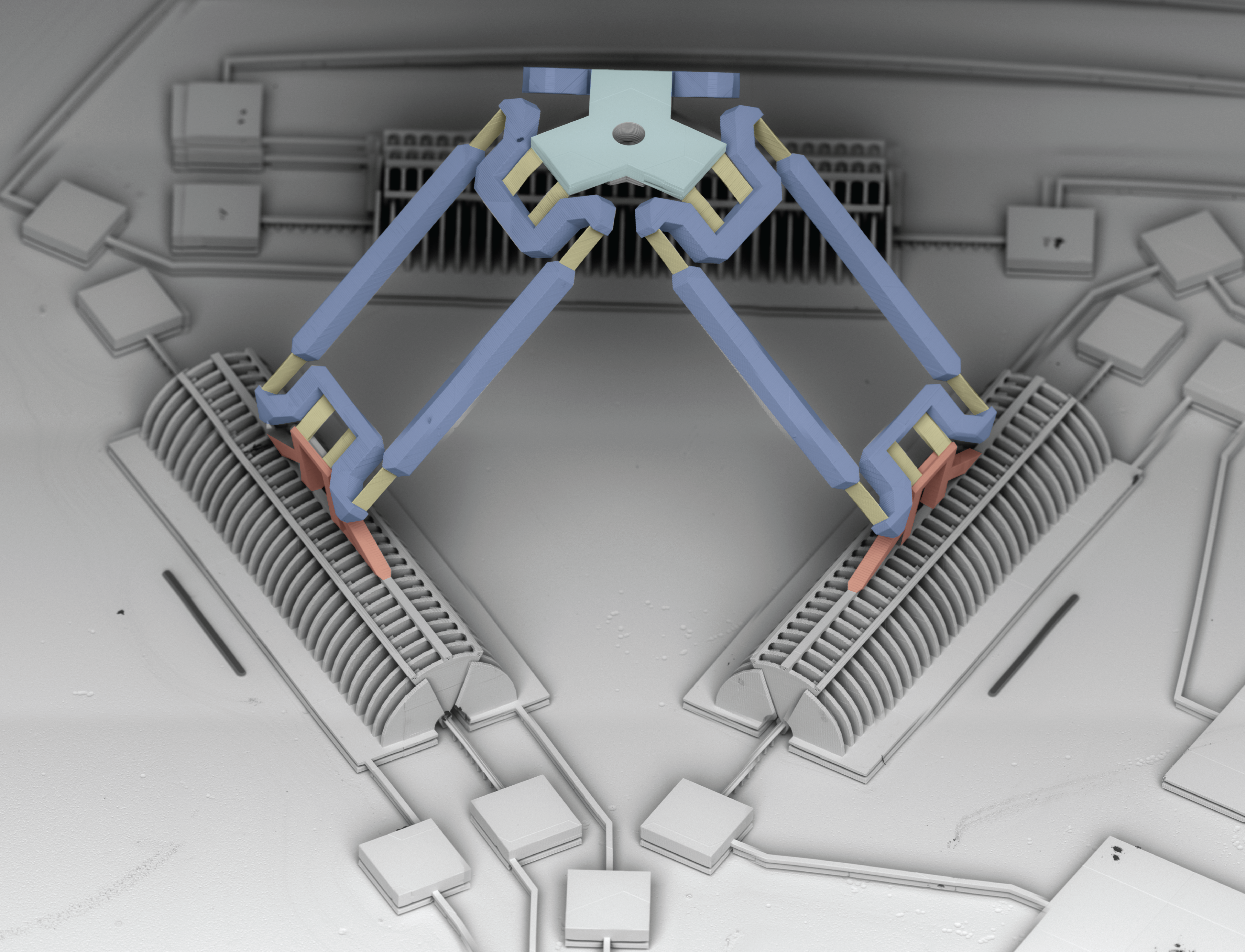 The microDelta: Downscaling robot mechanisms enables ultrafast and high-precision movementScience Robotics, 2025
The microDelta: Downscaling robot mechanisms enables ultrafast and high-precision movementScience Robotics, 2025 -
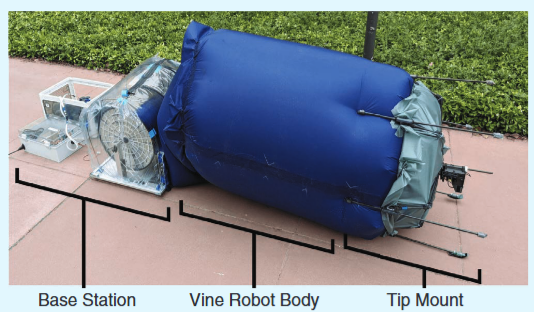 Large-Scale Vine Robots for Industrial Inspection: Developing a New Framework to Overcome Limitations With Existing Inspection MethodsIEEE Robotics & Automation Magazine, 2024
Large-Scale Vine Robots for Industrial Inspection: Developing a New Framework to Overcome Limitations With Existing Inspection MethodsIEEE Robotics & Automation Magazine, 2024

